Mechanisms
KRAKEN® Robotic Arm
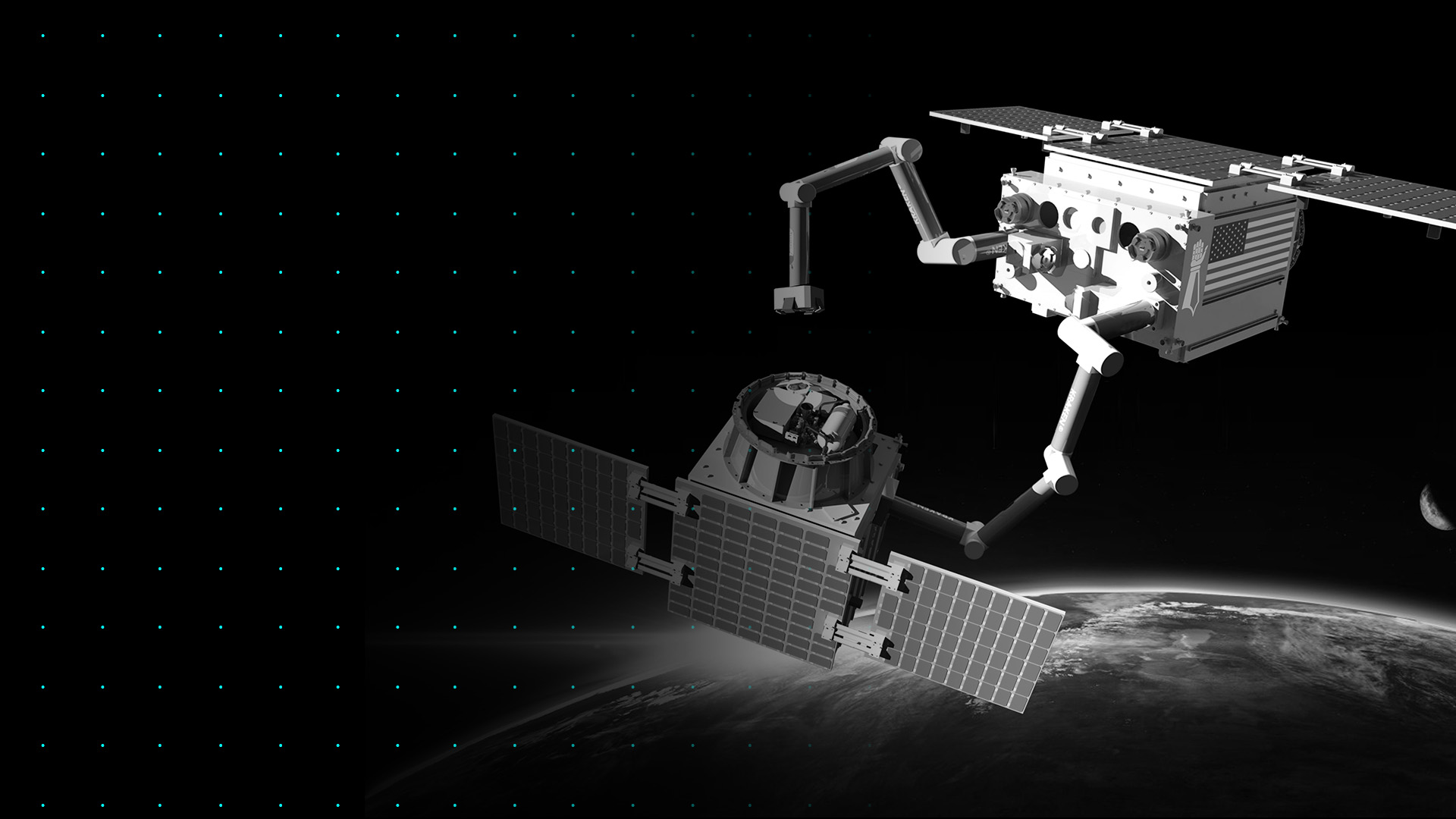
KRAKEN is a highly configurable robotic arm architecture built around reusable joint cores. Varying the size and number of each joint as well as the length of each segment between joints allows KRAKEN robotic arms to be quickly tailored to mission-specific reach, dexterity, and payload capacity requirements. KRAKEN robotic arms can also be configured for “active compliance.” This capability enables KRAKEN to relax its pose and allow the end effector to guide the arm into a mated position. It also allows the arm to limit end effector forces applied to the target during an interaction.
SILON Control Software
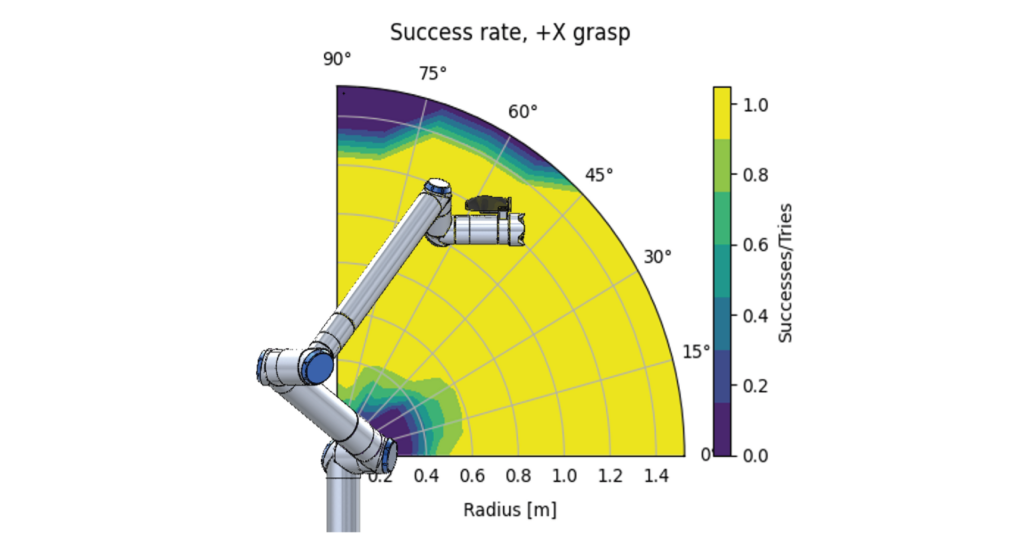
ARKA’s SILON control software comes standard with the KRAKEN Robotic Arm and EEV System Hardware. SILON software adds three major capabilities including: 1) Path planning and collision avoidance, 2) Visual servoing and fiducial localization, and 3) Fault tolerant manipulation behaviors. SILON includes fundamental manipulation behaviors, such as locating, moving to, and grasping a target payload even when knowledge of the payload location is only approximate. SILON is built on ROS2 and MoveIt, it can be interacted with and visualized using industry familiar ROS-based tools.